以下の書籍の例をPythonで試しました.
また,拡張カルマンフィルタを使うと,(当然)線形カルマンフィルタの例も計算できることを確かめます.

【関連記事】
PythonでUnscented Kalman Filter (UKF) - Notes_JP
拡張カルマンフィルタ
非線形関数$\bm{f}, h$を使ったモデルによって記述される,以下のスカラ時系列$\{y(k)\}$を考える.\begin{aligned}
\begin{cases}
\, \bm{x}(k + 1) = \bm{f} \bigl(\bm{x}(k)\bigr) + \bm{b} v(k)
& (\text{状態方程式}) \\
\, y(k) = h \bigl(\bm{x}(k)\bigr) + w(k)
& (\text{観測方程式})
\end{cases}
\end{aligned}
\begin{cases}
\, \bm{x}(k + 1) = \bm{f} \bigl(\bm{x}(k)\bigr) + \bm{b} v(k)
& (\text{状態方程式}) \\
\, y(k) = h \bigl(\bm{x}(k)\bigr) + w(k)
& (\text{観測方程式})
\end{cases}
\end{aligned}
拡張カルマンフィルタ(Extended Kalman filter - Wikipedia,EKF)では,非線形関数を線形近似して,線形カルマンフィルタに帰着させる.
以下も参考になるかも:
非線形カルマンフィルタの基礎
numpyによる実装
事後状態推定値$\hat{x}$,事後誤差共分散行列$P$,カルマンゲイン$\bm{g}$を返す関数:def ekf(f, h, dfdx, B, dhdx, Q, R, y, xhat, P): """ x(k+1) = f(x(k)) + Bv(k) y(k) = h(x(k)) + w(k) """ xhatm = f(xhat) A = dfdx(xhat) Pm = (A @ P @ A.T) + Q * (B @ B.T) CT = dhdx(xhatm) C = CT.T G = (Pm @ C) / ((CT @ Pm @ C) + R) xhat_new = xhatm + G * (y - h(xhatm)) P_new = (np.eye(len(A)) - (G @ CT)) @ Pm return xhat_new, P_new, G
上の関数を繰り返し適用して,$\hat{x}, \bm{g}$をすべての時系列で計算する関数:
def calc_timeseries_ekf(N, f, h, dfdx, B, dhdx, Q, R, y, x0, P_ekf): xhat_ekf = [x0] G0 = np.empty(x0.shape) G0[:] = np.nan G_ekf = [G0] for k in range(1, N): xhat_new, P_new, G = ekf(f, h, dfdx, B, dhdx, Q, R, y[k], xhat_ekf[-1], P_ekf) xhat_ekf.append(xhat_new) G_ekf.append(G) P_ekf = P_new xhat_ekf = np.array(xhat_ekf) G_ekf= np.array(G_ekf) return xhat_ekf, G_ekf
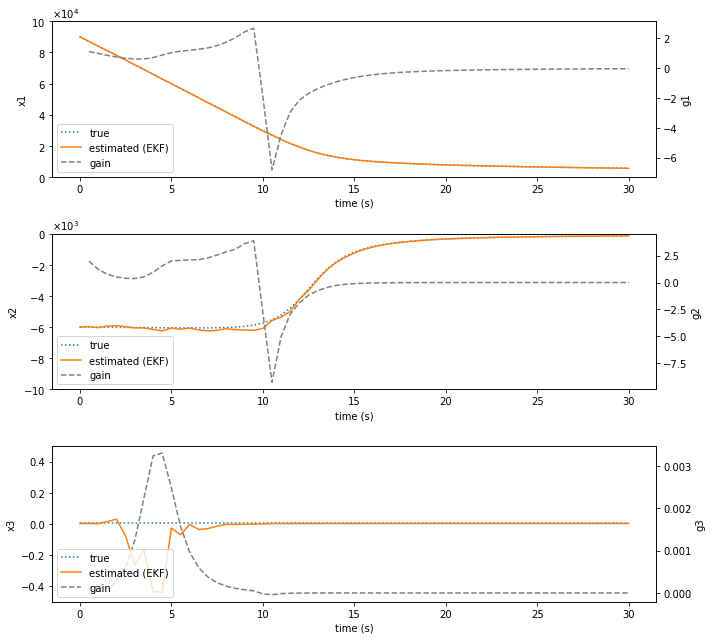
物体の落下運動
書籍7.4の例を,上の関数でシミュレーションする.背景については,次が参考になるかも.
Unscented Kalman Filterを用いた力学系の状態およびパラメータ推定
http://lab.cntl.kyutech.ac.jp/~nishida/lecture/psc/no9.pdf
次の記事で,Unscented Kalman Filter (UKF)との比較をしています.
PythonでUnscented Kalman Filter (UKF) - Notes_JP
import numpy as np import matplotlib.pyplot as plt import matplotlib.ticker as ptick # --- パラメータ --- rho = 1.23 g = 9.81 eta = 6e3 M = 3e4 a = 3e4 T = 0.5 EndTime = 30 N = int(EndTime / T + 1) time = T * np.arange(0, N) n = 3 R = 4e3 Q = 0 B = np.array([ [0], [0], [0] ]) # --- 関数 --- def f(x): x1, x2, x3 = x x1, x2, x3 = x1.item(0), x2.item(0), x3.item(0) res = np.array([ [x1 + T * x2], [x2 + T * (0.5 * rho * np.exp(- x1 / eta) * (x2 ** 2) * x3 - g)], [x3] ]) return res def h(x): x1, x2, x3 = x x1, x2, x3 = x1.item(0), x2.item(0), x3.item(0) return np.sqrt((M ** 2) + ((x1 - a) ** 2)) def dfdx(x): x1, x2, x3 = x x1, x2, x3 = x1.item(0), x2.item(0), x3.item(0) res = np.array([ [1, T, 0], [- T * 0.5 * (rho / eta) * np.exp(- x1 / eta) * (x2 ** 2) * x3, 1 + T * rho * np.exp(- x1 / eta) * x2 * x3, T * 0.5 * rho * np.exp(- x1 / eta) * (x2 ** 2) ], [0, 0, 1] ]) return res def dhdx(x): x1, x2, x3 = x x1, x2, x3 = x1.item(0), x2.item(0), x3.item(0) res = np.array([ [(x1 - a) / h(x), 0, 0] ]) return res # --- 真値, 測定値 --- w = np.random.normal(loc = 0.0, scale = np.sqrt(R), size = N) x = [np.array([ [9e4], [-6e3], [3e-3] ])] y = [h(x[-1]) + w[0]] for k in range(N - 1): x.append(f(x[-1])) y.append(h(x[-1]) + w[k + 1]) x = np.array(x) # --- EKF --- P_ekf = np.array([ [9e3, 0, 0], [0, 4e5, 0], [0, 0, 0.4] ]) xhat_ekf, G_ekf = calc_timeseries_ekf(N, f, h, dfdx, B, dhdx, Q, R, y, x[0], P_ekf) # --- プロット --- fig_num = 3 fig = plt.figure(figsize = (10, 3 * fig_num), tight_layout = True) axes = [fig.add_subplot(fig_num, 1, i + 1) for i in range(fig_num)] axes2 = [ax.twinx() for ax in axes] ylim = [(0, 1e5), (-1e4, 0), (-0.5, 0.5)] scilimits = [4, 3, 0] for i in range(fig_num): ax, ax2 = axes[i], axes2[i] ax.plot(time, x[:, i], label = 'true', ls = 'dotted') ax.plot(time, xhat_ekf[:, i], label = 'estimated (EKF)') ax.set_ylim(ylim[i]) ax2.plot(time, G_ekf[:, i], label = 'gain', ls = 'dashed', c = 'tab:gray') if scilimits[i] != 0: ax.yaxis.set_major_formatter(ptick.ScalarFormatter(useMathText = True)) ax.ticklabel_format(style="sci", axis="y", scilimits=(scilimits[i], scilimits[i])) ax.set_xlabel('time (s)') ax.set_ylabel(f'x{i + 1}') ax2.set_ylabel(f'g{i + 1}') lines, labels = ax.get_legend_handles_labels() li2, la2 = ax2.get_legend_handles_labels() lines += li2 labels += la2 ax2.legend(lines, labels, loc = 'lower left') plt.show()
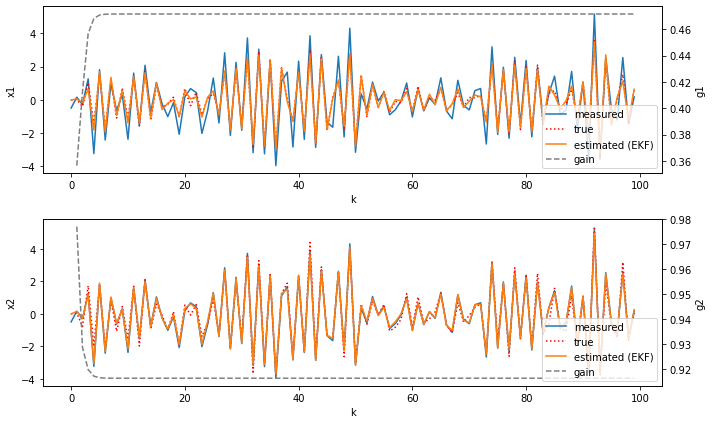
線形カルマンフィルタへの適用例
拡張カルマンフィルタは,当然,線形カルマンフィルタの問題に適用できる.書籍の例を,上の関数でシミュレーションしてみる.
例えば,例題6.3はこんな感じ.
# --- パラメータ --- A = np.array([ [0, -0.7], [1, -1.5] ]) B = np.array([ [0.5], [1] ]) C = np.array([ [0], [1] ]) N, Q, R = 100, 1, 0.1 # --- 関数 --- def f(x): return A @ x def h(x): return C.T @ x def dfdx(x): return A def dhdx(x): return C.T # --- 真値, 測定値 --- v = np.random.normal(loc = 0.0, scale = np.sqrt(Q), size = N) w = np.random.normal(loc = 0.0, scale = np.sqrt(R), size = N) x = [np.array([[0], [0]])] y = [h(x[-1]) + w[0]] for k in range(N - 1): x.append(f(x[-1]) + B * v[k + 1]) y.append(h(x[-1]) + w[k + 1]) x = np.array(x) y = np.array(y) # --- EKF --- gamma = 1 P_ekf = gamma * np.eye(2) xhat_ekf, G_ekf = calc_timeseries_ekf(N, f, h, dfdx, B, dhdx, Q, R, y, x[0], P_ekf) # --- プロット --- fig_num = 2 fig = plt.figure(figsize = (10, 3 * fig_num), tight_layout = True) axes = [fig.add_subplot(fig_num, 1, i + 1) for i in range(fig_num)] for i in range(fig_num): ax = axes[i] ax2 = ax.twinx() ax.plot(y[:, 0, 0], label = 'measured', c = 'tab:blue') ax.plot(x[:, i], label = 'true', ls = 'dotted', c = 'red') ax.plot(xhat_ekf[:, i], label = 'estimated (EKF)', c = 'tab:orange') ax2.plot(G_ekf[:, i], label = 'gain', ls = 'dashed', c = 'tab:gray') ax.set_xlabel('k') ax.set_ylabel(f'x{i + 1}') ax2.set_ylabel(f'g{i + 1}') lines, labels = ax.get_legend_handles_labels() li2, la2 = ax2.get_legend_handles_labels() lines += li2 labels += la2 ax2.legend(lines, labels, loc = 'lower right') plt.show()